
The development of the Harpoon anti-ship missile has been conducted by McDonald Douglas since the early 1970s. Design and flight testing of the new system continued until the summer of 1978.
The Harpoon anti-ship missile is produced in four main versions:
- RGM-84 for surface ships;
- UGM-84 for submarines;
- AGM-84 for aircrafts;
- RGM-84 for coastal defense.
Each of them has several models and modifications. The RGM-84A model is considered a basic model. Different foreign editions are characterized by their own ways of designating models and modifications of Harpoon missiles. For example, the following variants can be equally applied: RGM-84C1 or RGM-84 block 1C, RGM-84C block 1 and RGM 84C mod.1.
The first Harpoon RGM-84 missiles were delivered to surface ships in 1976. A "M-84 aircraft were the first to receive Orion R-ZS patrol aircraft in 1978. By mid-1990, the U.S. Navy was equipped with more than 210 Harpoon surface ships of the main classes (battleships, cruisers, destroyers, frigates), about 65% of nuclear submarines, more than 800 aircraft (R-ZS Orion, A-6 Intruder, A-7 Corsair, F/A-18 Hornet, S-3 Viking). In addition, as part of the U.S. Air Force, two squadrons of B-52S bombers have been converted to anti-ship missile carriers.
Composition:
The Harpoon rocket is built according to the normal aerodynamic scheme, has a modular design and a unified hull, folding cross-shaped wing and four steering wheels. The trapezoidal wing has a large sweep at the front edge and its folding arms are attached to the fuel tank body.
The Harpoon PKR can be launched by the operator by bearing and range or only by bearing on the target (if the range is unknown). In the first case, the missile's COS is triggered at the moment designated by the operator prior to launch, in the immediate vicinity of the target, which reduces the probability of detection of the ICR and the time for possible interference, in this case, to search for a target can be used small, medium or large sector scanning radar COS, the first is used when shooting at a group of targets at short range, but in this case, with increasing distance, the effectiveness of the COS decreases. When shooting at maximum range, a large scan sector is used. Several scanning modes, starting with the small sector, can be used to improve target acquisition efficiency. If no target is detected, a larger scan sector is used, so that the homing head works until the target is detected and captured. The CLO has no selective properties, so the PCR hits the first target that it has captured. When firing on the bearing, the CLO will engage at a set distance so as not to hit any other ship. When a group target is being attacked, it can simultaneously engage the homing heads of different rockets, which allows it to bypass some ships and attack others. The homing system has a moving target indicator, which makes it unlikely that a cloud of passive interference will be detected.
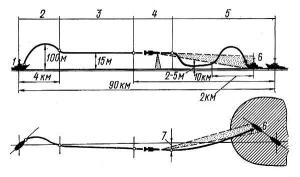
After the start slide, the missile drops to an altitude of 15 m above sea level and then performs a march flight. The missiles of the first modifications (RGM-84A and others) when approaching the target made a slide, captured the target and dive at an angle of about 30°. RGMs of subsequent modifications do not perform such a maneuver, as it is not included in the flight program, and attack the target, dropping to ultra-shallow altitudes (2-5 m).
Back in the late 70's to replace the basic model of the RGM-84A1 missiles began to arrive, characterized by a more advanced CNS with enhanced noise immunity. For three years, the British Navy, together with the U.S. Navy, funded work to reduce the altitude of the marching flight and change the software aimed at abandoning the slide before attacking the target. Beginning in 1982, a modification of the missile (B1) with a lower trajectory altitude was introduced into service. Subsequent development of the PCR (C1, 1984) has an extended range. In addition, the operator has the opportunity to set a target attack at extremely low altitudes (2-5 m) or (when attacking small ships) with a small slide (up to 30 m) before launching.
Previous Harpoon missile models (A1 and B1) were further developed by the company by transforming them into a new version (C1). Supplies of these missiles continued until the mid-1980s.
Since 1985, another model of the Harpoon missile - the RGM-84D - has appeared. Originally, it was designed for an anti-ship shore-based complex. The 2-fold increase in storage capacity and software improvements allowed the introduction of three reference points on the trajectory, where the RGM changes the direction of the flight, which takes place at low altitudes. Thanks to this, it is possible to use the missile in closed water areas and among islands, hiding the true direction from which the missile strike was made, which not only increases the secrecy of the carriers, but also ensures that the attack on the target from different directions. This model of PCR has a more advanced CNS, which has a higher interference immunity. At the same time, work continued on the creation of radar CNS, which uses digital methods of signal processing, which improves noise immunity. The production of such homing heads began in 1986.
The PCR models (C and D) use higher energy intensity fuel (JP-10 instead of JP-5). The transition to a new propellant did not require significant modifications to the marshalling propulsion system. The flight range has been increased by about 20% (up to 150 km). In the subsequent modifications of missiles it is assumed to use this fuel, and the previously released SKR will be transferred to it in the course of special regulatory work at the firm.
The development of the Harpoon rocket family also followed the path of software improvement (model D1). Such PCRs were supplied to the Navy for export.
When creating a version of the missile (D2) it was decided to increase the fuel tank by 0.6 m, and the range of the Harpoon RGM-84D2 will increase almost 2 times (up to 280 km). The range is also increased due to lower specific fuel consumption of the RGM-84D2.
The latest version of the rocket is AGM-84L block-2, equipped with a combat unit weighing 224 kg. It has a diameter of 340 mm, length - 4.6 m, range of targets - 130 km.

Work is underway to improve the radar CNS. It should provide automatic classification of the target by demarcating features, identifying the most important ship among the group or connection, the possibility of redirection to the surface target if the PCR missed the first run. However, the use of radar-based CNS imposes some restrictions on the operational use of missiles. Thus, with a decrease in the EPR of the target decreases the range of its detection and capture, the radio emission of the SOS reduces the stealth of a surprise missile attack, reduces the effectiveness of firing at surface ships (vessels) in the bases and ports, as well as on land targets, the presence of errors in the target designation or target exit from the limits of the zone of action of the SOS missiles do not allow for redirection of the SCR due to its full autonomy.
As a result of a study of combat experience, the U.S. Naval Command has concluded that it is necessary to create an inexpensive high-precision long-range, tele-controlled aircraft missile with a conventional warhead. Such a missile (AGM-84E) is designed on the basis of Harpoon PCR and is compatible with all its carriers, but is designed primarily to destroy ships in bases and ports and important stationary targets (factories, power plants, bridges). This model differs from the previous modules of the head compartment in which the guidance system equipment is placed. It consists of a thermal imaging head of the homing system (from the aircraft missile "Maverick" AGM-65f), a subsystem of data transmission from the guided aircraft bomb "Wallay" AGM-62A, a single-channel receiver satellite navigation system NAVSTAR with correction of the inertial guidance unit.
Target location data is entered into the missile's computer before it is launched. The flight in the marching section of the trajectory is based on the data from the inertial guidance unit corrected by NAVSTAR SNC, which ensures high accuracy of output to the specified area. Thermal-resistive SOS is switched on in the same way as the previous models of PCR. The data transmission subsystem with the image of the view area of the homing head is automatically switched on. This data is transmitted to a medium, where the operator selects a target or aiming point on the video terminal. Escorting the missile ends - after this data is transmitted to the homing system of the missile, and then the thermal imaging CNS operates autonomously, captures and escorts the target, ensuring its defeat. The minimum range of fire is reduced by capturing the target before the missile is launched. The existing data transmission subsystem (from AAB Wally) is not highly interference-resistant, so the U.S. Air Force experts suggest using similar equipment from the AGM-130 guided bombshell. To test the capabilities of the RGM-84E missile when launched from surface ships, tests were conducted earlier this year. Deck helicopter SH-60B system LEMPS MkZ was equipped with a video terminal that provides reception and processing of data. In addition, the feasibility of the helicopter as a repeater of target data to the surface ship from which the missile is launched is being studied.
Launchers.
Harpoon missiles can be fired from various launchers.

A special container-type Mk141 lightweight PU was created for surface ships and boats (see photo). It is an aluminium frame on which up to four GRP transport and launch containers with 15 starts can be placed at an angle of 35°. The containers are airtight and maintain a stable temperature. When stored in these containers, the missiles do not require additional maintenance and are always ready for combat use.
The Harpoon can also be launched from the Mk112 ("Asroc"), Mk11 and 13 ("Tartar") launchers.
When launched from a torpedo vehicle, the missile is placed in a hermetic capsule made of glass fibre and aluminium alloy. In its tail part is placed vertical keel and two folding stabilizers, providing movement on the underwater section at an angle of about 45 ° to the surface. After resurfacing due to positive buoyancy, the nose fairing and tail cone are shot off and the rocket's starting engine is launched. The PCR can be launched from a depth of about 60 m in any sea state. A typical American submarine load is up to six Harpoon missiles, although their number may vary depending on the nature of the task. They use different missile firing control systems (usually Mk117, some Mk113 mod. 10 boats).

The aircraft version of the Harpoon missiles is compatible with most NATO combat aircraft. It can be launched at various speeds and altitudes. After separation from the carrier, the missile is stabilized on the heel and pitch. It decreases with a dive angle of about 33° until the radio altitude signal is received. The marching engine is then automatically started.
When launching missiles from R-3 "Orion" and S-3 "Viking" aircraft, flying at low altitudes with low speeds, the marching engine of the Harpoon is launched on the pylon. Special launchers are used on the aircraft: AER065A1 (R-3 "Orion"), MAU-9A/1 (S-3 "Viking" and A-7E "Corsair-2"), AERO-7A1 (A-6E "Intruder") and others.

The coastal version of the anti-ship missile system "Harpoon" is placed on four tractors. Two of them carry container-type lightweight PU, while the other two carry spare containers with missiles and control devices. A variety of vehicles can be used for transport and launch vehicles, which simplifies the acquisition of PKKR batteries. At the same time, a wide range of equipment for communication, control, detection, reconnaissance and target designation is allowed.
Control devices on the carrier, according to the received target data, calculate the orientation angles of gyroscopic devices of the inertial guidance unit and the time of activation of the CNS. In addition, they provide power supply until the battery is activated, generate a combat course for the carrier, perform pre-launch inspection and control, and provide an electrical signal for missile launch.
In creating the launch support subsystem, it was considered that the system could be installed on different media, and the control devices should provide interaction between new PCR modifications and existing launch equipment.
To ensure target designation, analogue or digital data from aerospace reconnaissance systems, radio surveillance equipment, radars, GAS and others are used. The SH-60B helicopters equipped with an overview radar and a data transmission system play an important role. They can fly stealthily to a target at low altitude and, having made a brief altitude gain, make radar detection. Drones, airships and other advanced aircraft can perform similar tasks.
Characteristics:
| Features | A/U/RGM-84A and В | A/U/RGM-84C and О | A/U/RGM-84D2 | A/U/RGM-84E |
| The length of the rocket, m: booster |
4,57 | 4,57 | 5,18 | 5,23 |
| unaccelerated | 3,84 | 3,84 | 4,44 | 4,49 |
| The diameter of the rocket, m | 0,34 | 0,34 | 0,34 | 0,34 |
| Wingspan, m | 0,91 | 0,91 | 0,91 | 0,91 |
| Starter weight, kg | 667 | 667 | 742 | 765 |
| Weight of combat unit, kg | 225 | 225 | 235 | 225 |
| Flight range, km maximum |
120 | 150 | 280 | 150 |
| minimum | 13 | 13 | . | . |
| Flight speed on the march, number M | 0,85 | 0,85 | 0,85 | 0,85 |
| Guidance system: on the flight deck | Inertial | Inertial | Inertial | Inertial with correction from NAVSTAR SNC |
| end-of-life | Active Radar | Active Radar | Active Radar | Thermal imaging, with remote control |
Testing:
The effectiveness of the missiles was demonstrated during test launches and under combat conditions. U.S. experts estimate that to disable an aircraft carrier (light aircraft carrier) will require five Harpoon PCRs, to defeat a cruiser - four, and the destroyer - two; one missile is able to produce serious damage when hitting a small ship or boat.
In March 1986, two Libyan missile boats were sunk by Harpoon missiles in Sidra Bay. Thus, March 25, a large Libyan missile boat "Ein Zagut", which was patrolling the Libyan coast, was suddenly fired by the American cruiser "Jordan Town" from a distance of only 11 miles. Two Harpoon RGM-84 missiles hit the boat, which sank 15 minutes later.
The second Libyan boat Vokhod was sunk on March 24 by a Harpoon ASM-84 missile launched from the U.S. attack aircraft Intruder A-6. The missile hit the superstructure of the 311 t displacement boat. The superstructure was destroyed and the commander of the boat was killed in it. The engines of the boat remained in service, but the crew decided not to extinguish the fire. One hour after the crew left, the boat sank.
Two more years later, two Iranian ships were sunk in the Persian Gulf by Harpoon missiles.
During the operation "Desert Storm" (17.01.1991-01.03.1991), Harpoon missiles were used against the Iraqi Navy according to the data of on-board carrier vehicles for guidance of external sources. The missile application distances did not exceed 40 km due to difficulties in detecting small targets by onboard radars. There were instances where the missile could not have been reduced enough to hit a low-borne small target and hit a lightweight superstructure. At the same time, the missile's warhead exploded after the target had passed and the effectiveness of the fire was thus reduced. At the same time, detected combat episodes related to the Harpoon's application indicates that the effectiveness of the onboard target guidance system for the missile at the end site was extremely high.
Sources:
- С.Кочубей "Совершенствование противокорабельного ракетного комплекса "ГАРПУН"
- Широкорад А.Б. "История авиационного вооружения", -Мн.: Харвест, 1999.-560с.
- В. Степанов "Буря в пустыне"










{kind=link}